DFG: Emmy-Noether-Grand: Dr. Christian Klaes (PI, Coordinator), Prof. Dr. Kirsten Schmieder (PI), Prof. Dr. Ioannis Iossifidis (PI).
03/2016 — 02/2021
Tetraplegic patients are paralyzed from the neck down. Their severe condition is often the result of car accidents or falls. According to the National Spinal Cord Injury Statistical Center approximately 160.000 persons in the USA are living with complete or partial tetraplegia as of 2014. In Germany about 1200‐ 1500 new cases of paralyzing spinal cord injuries are registered each year. 900 of those are the results of accidents. The average age at time of injury is 40 years and 70% of patients are male. Currently there is no way to cure the condition but constant technological advances have improved the autonomy of patients significantly. Although restricted in various ways a majority of tetraplegics rates the restoration of hand and arm functions as being of highest importance to them (Anderson, 2004). A range of assistive technologies, like motorized wheelchairs and extracorporeal robotic arms, are available to help paralyzed individuals regain control of their environment, but controlling these devices remains a challenge. One intriguing way to intuitively regain control of anthropomorphic robotic limbs is to use a brain‐computer interface (BCI).
This project is intended as a pilot study for human neuroprosthetic research in Germany. The aim is to establish a BCI research lab which will use state of the art technology and innovative concepts to advance the field of neuroprosthetics and neuroscience in general.
The project is split into two phases.
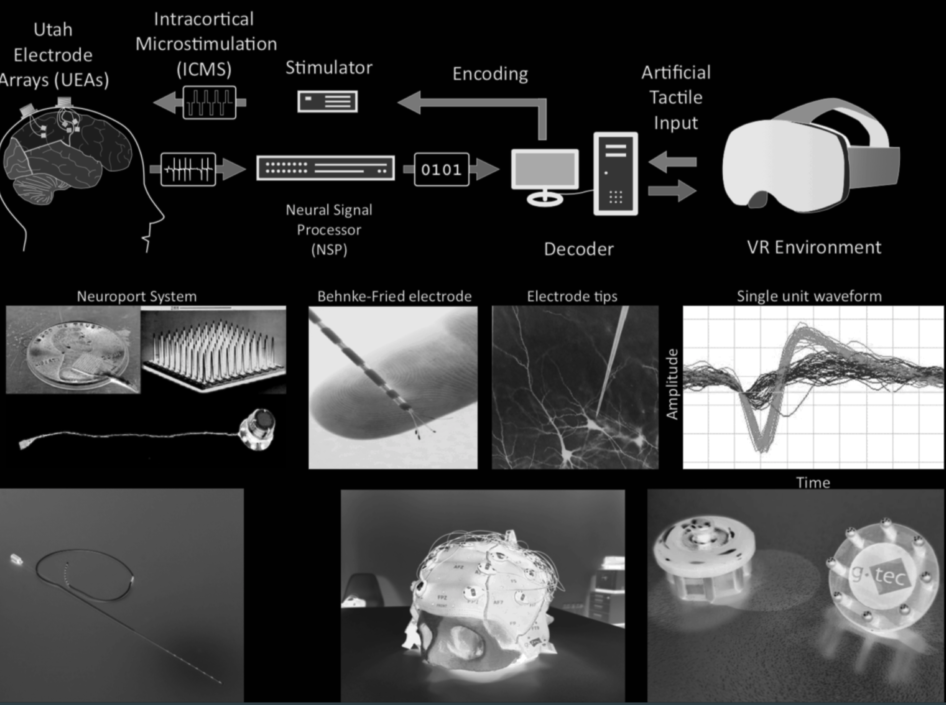
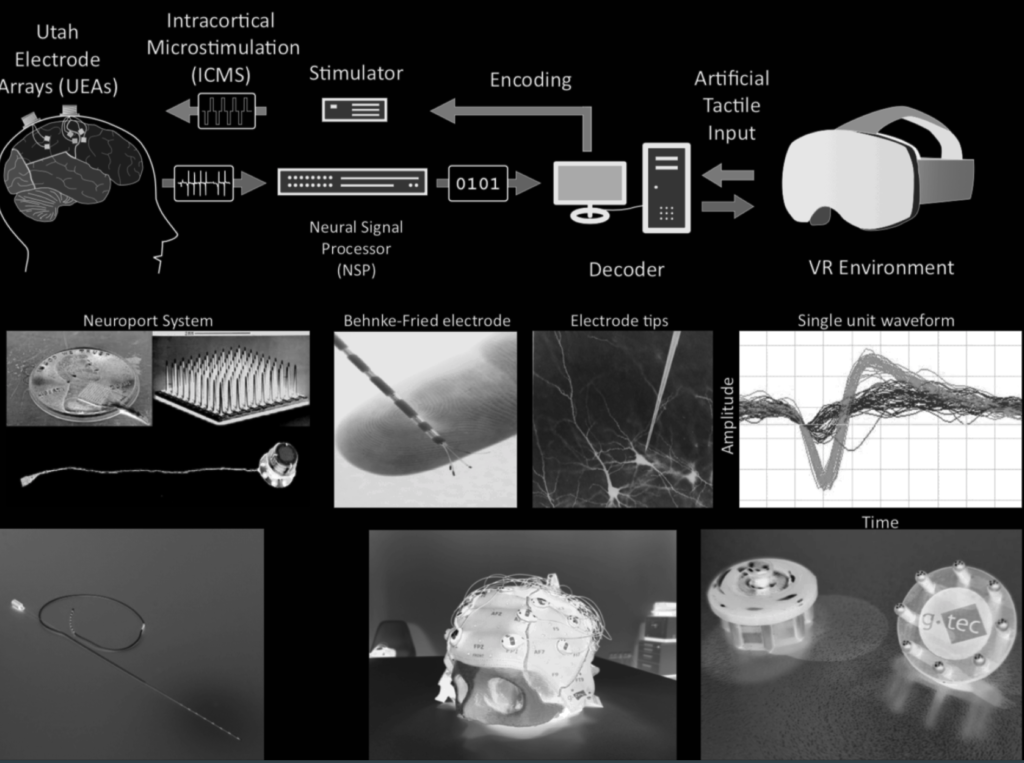
In the first phase we will develop the software infrastructure for BCI control which will be based on software that was used in the Caltech human subject study. The software will include a fully immersive VR environment including functional models of robotic limbs which have been used in several clinical studies. The software will also manage the application of electrical cortical stimulation when parts of the virtual robotic limbs are touched to create a virtual sense of touch. Stimulation artifact removal from the neuronal signal will be included as well to allow decoding of movement intentions while stimulation is applied.
Furthermore the software will allow for adaptive assistance to integrate high‐level movement intentions (from PPC) and low‐level movement trajectories (from primary motor cortex) with computer intelligence to provide an optimal level of control for the patient. In this first phase we will collect data from consenting epilepsy patients who are implanted with ECoG grids for medical reasons. ECoG grids are implanted in these patients for a short time prior to epilepsy surgery to locate epileptogenic zones. Patients who have grids implanted over areas we are interested in, primary motor cortex, primary somatosensory cortex and PPC, could participate in the first phase. We will use the recorded LFP signals to control virtual robotic limbs and other devices. The patients will learn to control computer cursors on a screen and virtual robotic limbs within the VR environment. Within the VR environment we will optimize control paradigms in a variety of scenarios.
For further information see also