Published at BioMedical Engineering OnLine
Marie D. Schmidt*, Tobias Glasmachers and Ioannis Iossifidis
Abstract
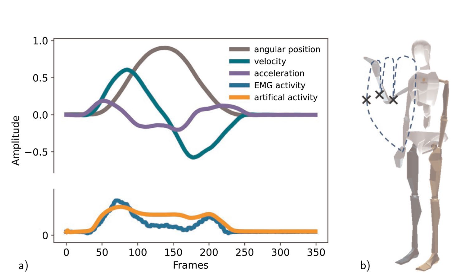
Background: The underlying motivation of this work is to demonstrate that artificial muscle activity of known and unknown motion can be generated based on motion parameters, such as angular position, acceleration, and velocity of each joint (or the end-effector instead), which are similarly represented in our brains. This model is motivated by the known motion planning process in the central nervous system. That process incorporates the current body state from sensory systems and previous experi- ences, which might be represented as pre-learned inverse dynamics that generate associated muscle activity.
Methods: We develop a novel approach utilizing recurrent neural networks that are able to predict muscle activity of the upper limbs associated with complex 3D human arm motions. Therefore, motion parameters such as joint angle, velocity, acceleration, hand position, and orientation, serve as input for the models. In addition, these models are trained on multiple subjects (n=5 including , 3 male in the age of 26±2 years) and thus can generalize across individuals. In particular, we distinguish between a gen-
eral model that has been trained on several subjects, a subject-specific model, and a specific fine-tuned model using a transfer learning approach to adapt the model to a new subject. Estimators such as mean square error MSE, correlation coefficient r, and coefficient of determination R2 are used to evaluate the goodness of fit. We additionally assess performance by developing a new score called the zero-line score. The present approach was compared with multiple other architectures.
Results: The presented approach predicts the muscle activity for previously through different subjects with remarkable high precision and generalizing nicely for new motions that have not been trained before. In an exhausting comparison, our recurrent network outperformed all other architectures. In addition, the high inter-subject varia- tion of the recorded muscle activity was successfully handled using a transfer learning approach, resulting in a good fit for the muscle activity for a new subject.
Conclusions: The ability of this approach to efficiently predict muscle activity contrib- utes to the fundamental understanding of motion control. Furthermore, this approach has great potential for use in rehabilitation contexts, both as a therapeutic approach and as an assistive device. The predicted muscle activity can be utilized to guide func- tional electrical stimulation, allowing specific muscles to be targeted and potentially improving overall rehabilitation outcomes.