Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We present a work focused on: • online trajectory generation with autonomous dynamical systems • obstacles change end-effector direction of movement in least disturb…
ISR / ROBOTIK 2010: Scene Representation for Anthropomorphic Robots: A Dynamic Neural Field Approach
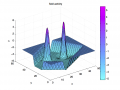
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We will present a work focused on the development of a unified modeling language for cognitive robotic architectures, based on Dynamic Field Theory, which provides the nature of elementary building blocks, Dynamic Neural Fields, along with the type of … Read More “ISR / ROBOTIK 2010: Scene Representation for Anthropomorphic Robots: A Dynamic Neural Field Approach” »

Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We will present a work focused on: • head tracking using the Nintendo WiiMote game controller and a row of three infrared LEDs that are attached to a pair of safety glasses • system reflects the visual changes of … Read More “ISR / ROBOTIK 2010: Using ego motion feedback to improve the immersion in virtual reality environments” »
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We will present a work focused on: • head tracking using the Nintendo WiiMote game controller and a row of three infrared LEDs that are attached to a pair of safety glasses • system reflects the visual changes of … Read More “ISR / ROBOTIK 2010: Using ego motion feedback to improve the immersion in virtual reality environments” »
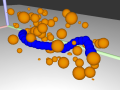
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We present a work focused on: • online trajectory generation with autonomous dynamical systems • obstacles change end-effector direction of movement in least disturbing fashion to prevent collision • high success rate, even in highly cluttered environments
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We present a work focused on: • online trajectory generation with autonomous dynamical systems • obstacles change end-effector direction of movement in least disturbing fashion to prevent collision • high success rate, even in highly cluttered environments
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We will present a work focused on: • head tracking using the Nintendo WiiMote game controller and a row of three infrared LEDs that are attached to a pair of safety gla…
ISR / ROBOTIK 2010: Scene Representation for Anthropomorphic Robots: A Dynamic Neural Field Approach
Meet us at the ISR / ROBOTIK 2010 conference in Munich Germany, at 7-9 June 2010. We will present a work focused on the development of a unified modeling language for cognitive robotic architectures, based on Dynamic Field Theory, which provides the …

Pressemitteilung der Ruhr-Universität Bochum unter http://www.pm.ruhr-uni-bochum.de/pm2009/msg00274.htm Auf dem Schreibtisch, an dem Sie sitzen, finden Sie sich spielerisch zurecht, ergreifen Gegenstände, legen sie woanders ab, setzen Teile zusammen oder stapeln sie. Robotern fällt es dagegen immer noch sehr schwer, in einer solchen Szene autonom gezieltes Bewegungsverhalten zu erzeugen. Dazu brauchen sie nämlich kognitive Prozesse wie die … Read More “Neuronale Grundlagen des Lernens” »