Software

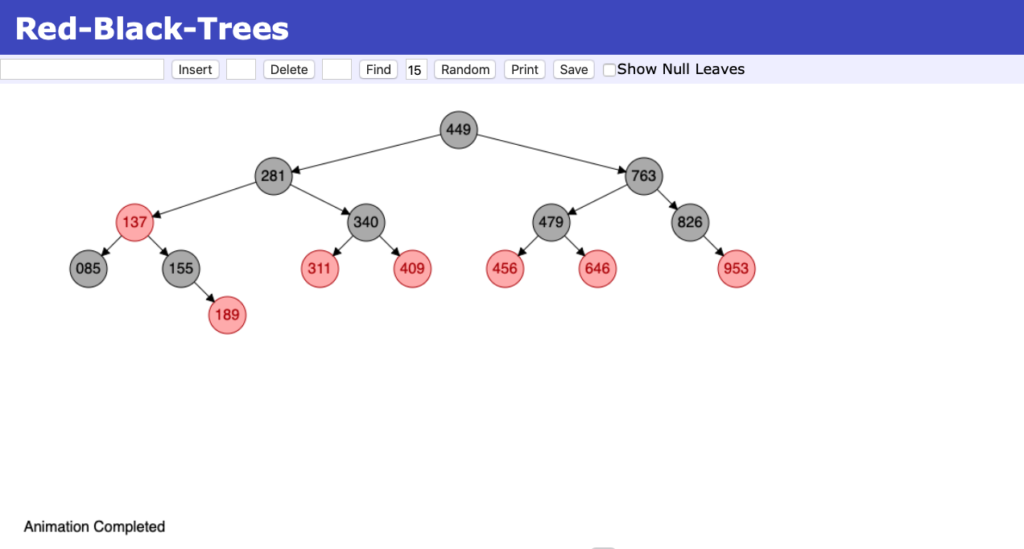
Visualisation-animation of BSTs, B-Trees and Red-Black-Trees. A modified version of David Galles’ visualisation of BSTs, B-Trees and Red-Black-Trees
tree-visualisation
A modification of David Galles’ visualisation of BSTs, B-Trees and Red-Black-Trees.
Manual
- Insert: Enter one or more numbers between
0and999. Separate them with your favorite non-digit character sequence. PressInsert. - Delete: Enter a number. Press
Delete. - Find: Enter a number. Press
Find. - Polulate randomly: Enter a count between
1and99. PressRandom. - In-order deth first search: Press
Print. - Export to SVG: Press
Save.
Visualisations
Modifications
Functional
General
- Multiple values can be inserted at once (values can be separated by any non-digit character, causing that…)
- Only numbers can be added
- Maximum value is
999. - A number of random values between
000and999can be inserted - Trees can be exported to SVG.
B-Trees
- Changed degree notation to be in line with Cormen et al. – Introduction to Algorithms
Visual
- Color theme changed
- Canvas font size increased

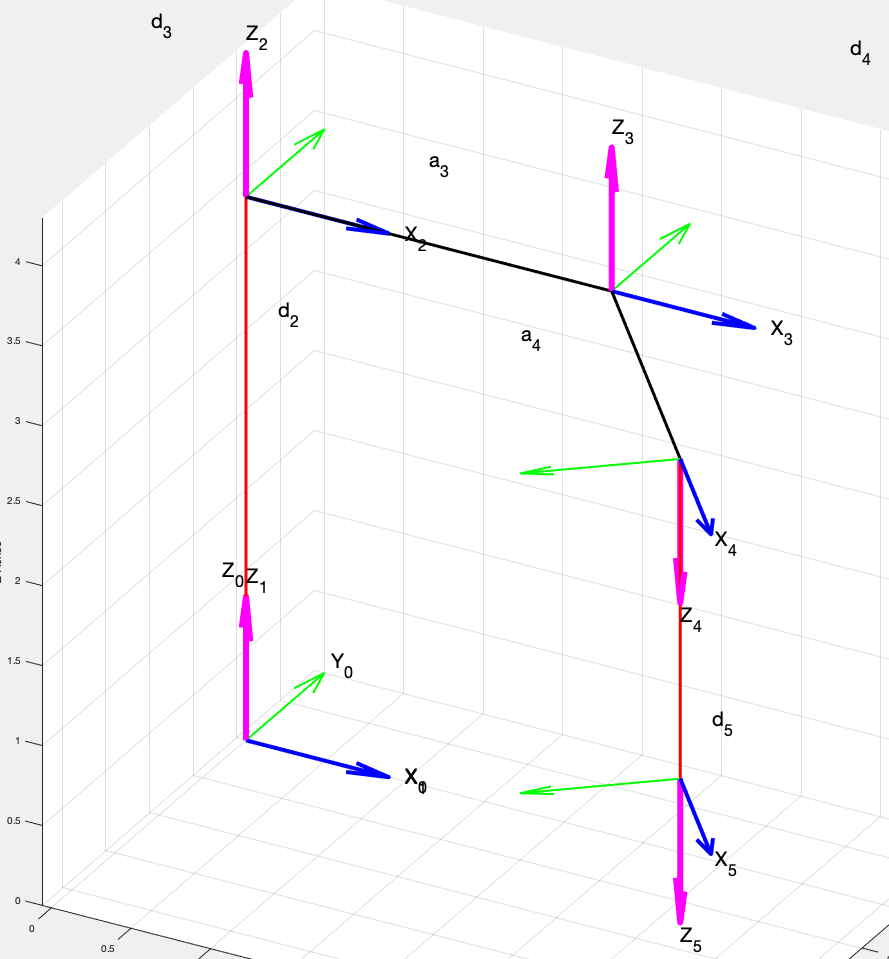
Interactive simulation of the Dennavit Hardenberg convention for open chain manipulators (robot arms)


 The DynSys-Simulator implement a numerical solution for dynamical systems used in the attractor dynamics approach to robotics. Position, range and number of attractors and repellors can be changed interactively while the phase plot is updated in an closed loop. The simulator visualizes the behavior of the dynamical systems and can give an intuition how it is utilized for the generation of trajectories for mobile robots and redundant manipulators.
The DynSys-Simulator implement a numerical solution for dynamical systems used in the attractor dynamics approach to robotics. Position, range and number of attractors and repellors can be changed interactively while the phase plot is updated in an closed loop. The simulator visualizes the behavior of the dynamical systems and can give an intuition how it is utilized for the generation of trajectories for mobile robots and redundant manipulators.
Download-Link: