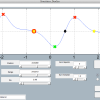
 The DynSys-Simulator implement a numerical solution for dynamical systems used in the attractor dynamics approach to robotics. Position, range and number of attractors and repellors can be changed interactively while the phase plot is updated in an closed loop. The simulator visualizes the behavior of the dynamical systems and can give an intuition how it is utilized for the generation of trajectories for mobile robots and redundant manipulators.
The DynSys-Simulator implement a numerical solution for dynamical systems used in the attractor dynamics approach to robotics. Position, range and number of attractors and repellors can be changed interactively while the phase plot is updated in an closed loop. The simulator visualizes the behavior of the dynamical systems and can give an intuition how it is utilized for the generation of trajectories for mobile robots and redundant manipulators.
Download-Link: