Conference participation, scientific publication
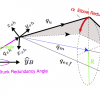
In the current work a closed form solution for a multi redundant open chain manipulator is presented. Exploiting the geometrical properties of the open chain we derive first an analytic solution for the seven degree of freedom arm. And introduce then a methodology to incorporate additional degree of freedoms in the chain preserving the closed … Read More “ICRA2013:Closed Form Solution for Inverse Kinematical Mapping for Redundant Open Chain Manipulators(submitted)” »

