The generation of discrete movement with distinct and stable time courses characterizes each human movement and reflect the need to perform catching and interception tasks and for timed action sequences, incorporating dynamically changing environmental constraints.  Several lines of evidence suggest neuronal mechanism for the initiation of movements i.e. in the supplementary motor area (SMA) and the premotor cortex and for movement planning mechanism generating velocity profiles satisfying time constraints.
Several lines of evidence suggest neuronal mechanism for the initiation of movements i.e. in the supplementary motor area (SMA) and the premotor cortex and for movement planning mechanism generating velocity profiles satisfying time constraints.
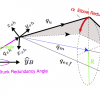
In order to meet the requirements of on-line evolving trajectories we propose a model, based on dynamical systems which describes goal directed trajectories in humans and generates trajectories for redundant anthropomorphic robotic arms. The analysis of the attractor dynamics based on the qualitative comparison with measurements of resulting trajectories taken from arm movement experiments with humans created a framework able to reproduce and to generate naturalistic human like arm trajectories.
Conference participation, scientific publication
Investigation of the Interplay of Model-Based and Model-Free Learning Using Reinforcement Learning The reward prediction error hypothesis of dopamine in the brain states that activity of dopaminergic neurons in certain brain regions correlates with the reward prediction error that corresponds to the temporal difference error, often used as a learning signal in model free reinforcement … Read More “BCCN23: Investigation of the Interplay of Model-Based and Model-Free Learning Using Reinforcement Learning” »

 Over the last decades the generation mechanism and the representation of goal- directed movements has been a topic of intensive neurophysiological research. The investigation in the motor, premotor, and parietal areas led to the discovery that the direction of hand’s movement in space was encoded by populations of neurons in these areas together with many other movement parameters. These distributions of population activation reflect how movements are prepared ahead of movement initiation, as revealed by activity induced by cues that precede the imperative signal (Georgopoulos, 1991).
Over the last decades the generation mechanism and the representation of goal- directed movements has been a topic of intensive neurophysiological research. The investigation in the motor, premotor, and parietal areas led to the discovery that the direction of hand’s movement in space was encoded by populations of neurons in these areas together with many other movement parameters. These distributions of population activation reflect how movements are prepared ahead of movement initiation, as revealed by activity induced by cues that precede the imperative signal (Georgopoulos, 1991).